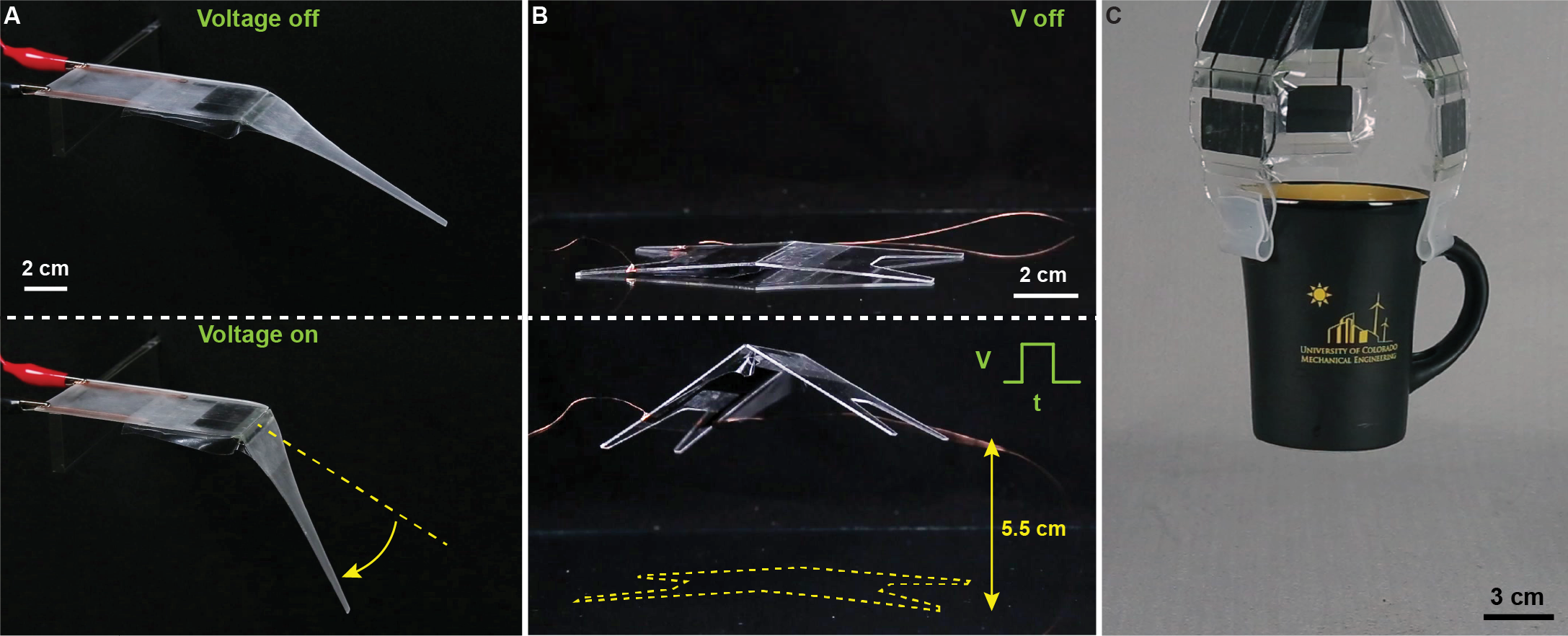
Spider-inspired electrohydraulic soft-actuated (SES) joints. (A) SES joints are rotational joints in which an electrohydraulic zipping mechanism generates rotation. (B) SES joints are powerful enough to make a robot jump ten times its height. (C) A gripper consisting of SES joints.
Unlike most animals, who rely on antagonistic pairs of muscles to move their joints, spiders use a hydraulic mechanism to extend their joints and they use muscles only for flexion. This lightweight hydraulic mechanism allows spiders to perform precise and coordinated, but also fast and powerful, motion. Developing robots that match the capabilities of spider joints remains a challenge to date.
Inspired by the hydraulic architecture of spider joints and based on the HASEL technology [ ], we have developed low-profile, lightweight actuators for joints in articulated robots [ ]. Such a spider-inspired electrohydraulic soft-actuated (SES) joint is formed by attaching a thin-film shell, which is covered on both sides with compliant electrodes and filled with a liquid dielectric, to a robot joint. When a voltage is applied between electrodes, the resulting electric field causes the shell to zip together displacing the liquid dielectric. The resulting deformation of the shell flexes the joint.
We demonstrated SES joints with actuation angles up to 70º, blocking torques up to 70 mN·m, and specific torques up to 21 N·m/kg. The roll-off frequencies of these joints were as high as 24 Hz, and their specific powers reached 230 W/kg. Additionally, we derived a theoretical model for SES joints, which rationalizes these results and shows how their output performance can be further improved. Because of their electrohydraulic working principle, SES joints are backdrivable, and they exhibit a catch state, which drastically reduces their energy consumption compared with servo motors when holding a position under load.
SES joints can readily be integrated into articulated robots. We designed a low-profile robot that jumped ten times its height exploiting the high peak output power of SES joints. Multiple, individually addressable SES joints can be combined to design limbs with multiple controllable degrees of freedom. We used SES joints to construct a three-fingered gripper, which was able to grasp objects of various sizes and weights.
Their light weight and low profile together with their well-rounded performance make SES joints ideal building blocks for future mobile robotic systems with high outptut forces, high speed operation, and low power consumption