Artificial Muscles for Tremor Suppression
- 06 March 2025
- Robotic Materials
Scientists at the Max Planck Institute for Intelligent Systems, the University of Tübingen and the University of Stuttgart under the Bionic Intelligence Tübingen Stuttgart (BITS) collaboration developed a biorobotic arm that can mirror human tremors, such as those experienced by individuals that live with Parkinson's disease. Artificial muscles on either side of the forearm contract and relax to suppress the involuntary shaking of the wrist and hand. The researchers see their biorobotic arm not only as a platform for other scientists in the field to test new ideas in exoskeleton technology. The arm also serves as a test bed to see how well artificial muscles known as HASELs can one day become the building blocks of wearable devices. The vision is to one day develop a sleeve that tremor patients can comfortably wear to be able to better cope with everyday tasks such as holding a cup.
Key points:
- Slim and lightweight HASEL artificial muscles effectively suppress human tremor
- Reproduction of patient recordings of tremor episodes in a robotic platform/mechanical patient
- Computer simulation of tremor arm validates that forces are sufficient for practical applications
- Avoiding time consuming clinical testing in early stages of technology development
Stuttgart/Tübingen – It is estimated that around 80 million people worldwide live with a tremor. For example, those who live with Parkinson's disease. The involuntary periodic movements sometimes strongly affect how patients are able to perform daily activities, such as drinking from a glass or writing. Wearable soft robotic devices offer a potential solution to suppress such tremors. However, existing prototypes are not yet sophisticated enough to provide a real remedy.
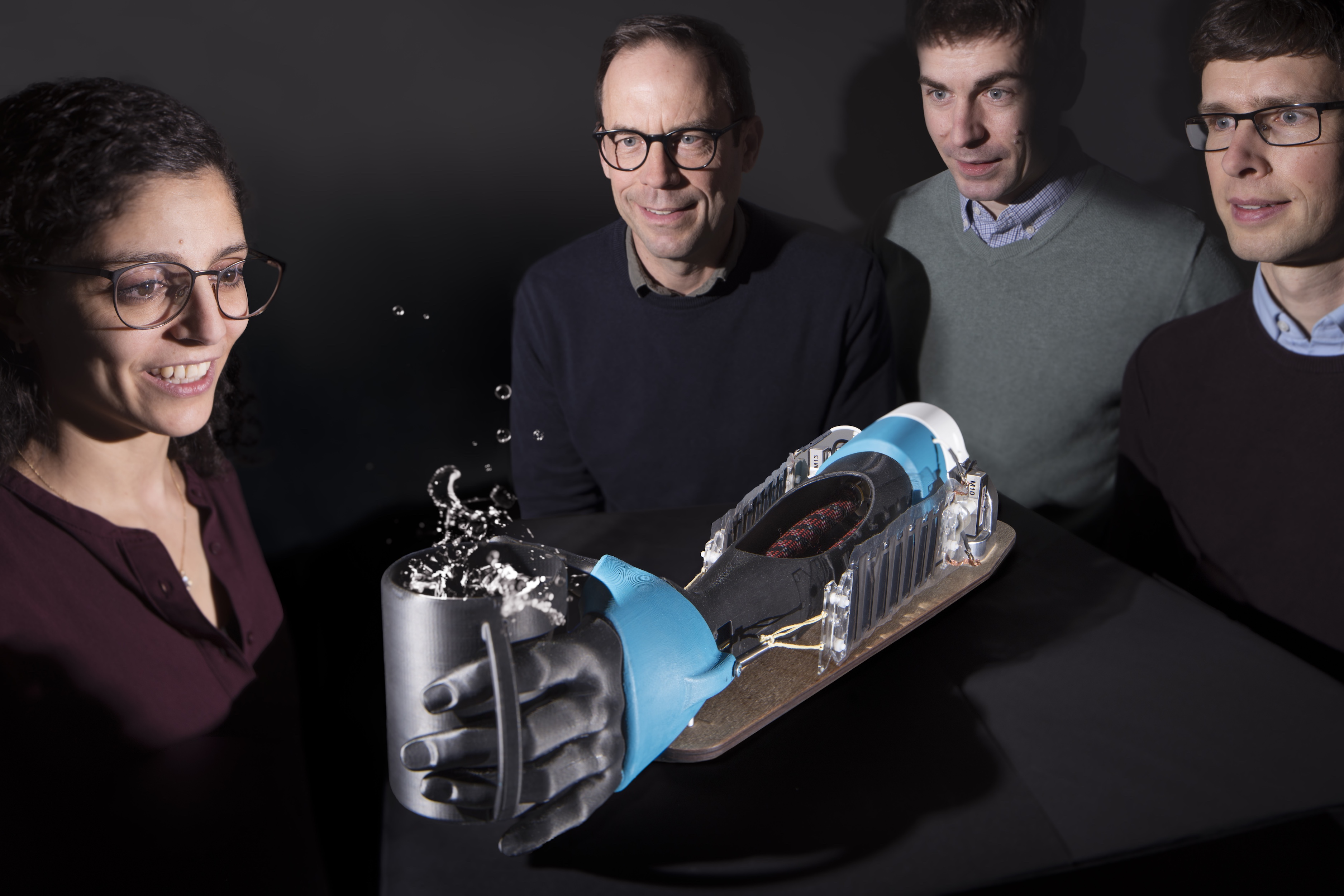
From left to right: Alona Shagan Shomron, Syn Schmitt, Christoph Keplinger and Daniel Häufle
Scientists at the Max Planck Institute for Intelligent Systems (MPI-IS), the University of Tübingen, and the University of Stuttgart under the Bionic Intelligence Tübingen Stuttgart (BITS) collaboration want to change this. The team equipped a biorobotic arm with two strands of artificial muscles strapped along the forearm. As can be seen in this video, the biorobotic arm – here dubbed the mechanical patient – simulates a tremor. Several real tremors were recorded and projected onto the biorobotic arm which then mirrors how each patient shakes the wrist and hand. However, once the tremor suppression is activated, the lightweight artificial muscles, which are made of electro-hydraulic actuators, contract and relax in such a way as to compensate for the back-and-forth movement. Now, the tremor can hardly be felt or seen.
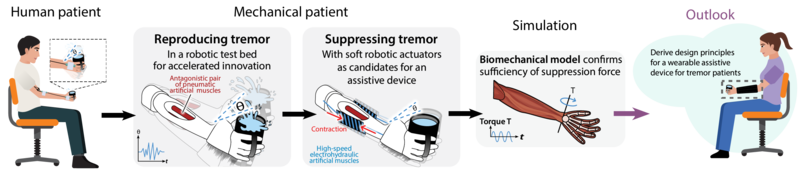
Figure 1. Comprehensive approach for rapid evaluation of emerging tremor suppression technologies.
With this arm, the team wants to achieve two goals: First, the team sees their biorobotic arm as a platform for other scientists in the field to test new ideas in assistive exoskeleton technology. Together with their biomechanical computer simulations, developers can quickly validate how well their soft artificial muscles perform, thereby avoiding time-consuming and costly clinical testing on real patients – which in some countries is not even legally possible.
Furthermore, the arm serves as a test bed for the artificial muscles the Robotic Materials Department at MPI-IS is well known for in the scientific community. Over the years, these so-called HASELs have been fine-tuned and improved. It is the team’s vision for HASELs to one day become the building blocks of an assistive wearable device that tremor patients can comfortably wear to be able to better cope with everyday tasks such as holding a cup.
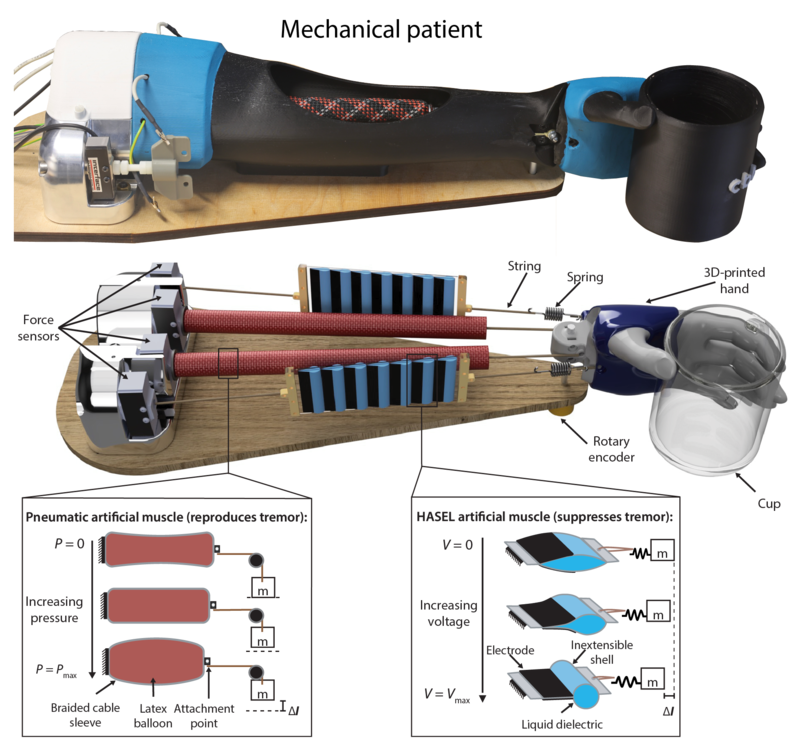
Figure 2. Design and control of the mechanical patient and tremor suppression mechanism.
”We see a great potential for our muscles to become the building blocks of a garment one can wear very discreetly so that others don't even realize the person suffers from a tremor,” says Alona Shagan Shomron, a postdoc in the Robotic Materials Department at MPI-IS and first author of a research paper that was published in the journal “Device”. “We showed that our artificial muscles, which are based on the HASEL technology, are fast and strong enough for a large range of tremors in the wrist. This shows the great potential of a HASEL-based wearable assistive device for individuals living with a tremor,” Shagan adds.
“With the combination of mechanical patient and biomechanical model we can measure if any tested artificial muscles are good enough to suppress all tremors, even very strong ones. So if we ever created a wearable device, we could adjust it to respond individually to each tremor,” Daniel Häufle adds. He is a professor at the Hertie Institute for Clinical Brain Research at the University of Tübingen. Among other things, he created the computer simulation and collected the tremor data from patients.
“The mechanical patient allows us to test the potential of new technologies very early in the development, without the need for expensive and time-consuming clinical testing on real patients”, says Syn Schmitt, Professor for Computational Biophysics and Biorobotics at the University of Stuttgart. “A lot of good ideas are often not further pursued, as clinical testing is expensive and time-consuming and hard to fund at very early stages of technology development. Our mechanical patient is the solution which allows us to test the potential very early in the development.”
“Robotics has great potential for healthcare applications. This successful project highlights the key role that soft robotic systems, based on flexible and deformable materials, will play," Christoph Keplinger, the Director of the Robotic Materials Department at MPI-IS, concludes.
Reference:
A. Shagan Shomron, C. Chase-Markopoulou, J. R. Walter, J. Sellhorn-Timm, Y. Shao, T. Nadler, A. Benson, I. Wochner, E. H. Rumley, I. Wurster, P. Klocke, D. Weiss, S. Schmitt, C. Keplinger*, D. Haeufle*, „A robotic and virtual testing platform highlighting promise of soft wearable actuators for suppression of wrist tremor“, Device, 2025.
DOI: https://doi.org/10.1016/j.device.2025.100719
Video
Tremor
robotic arm
robotics
Hasel
Syn Schmitt
Christoph Keplinger
Alona Shagan
biorobotics

