Dynamics of Electrohydraulic Soft Actuators
2020
Article
rm
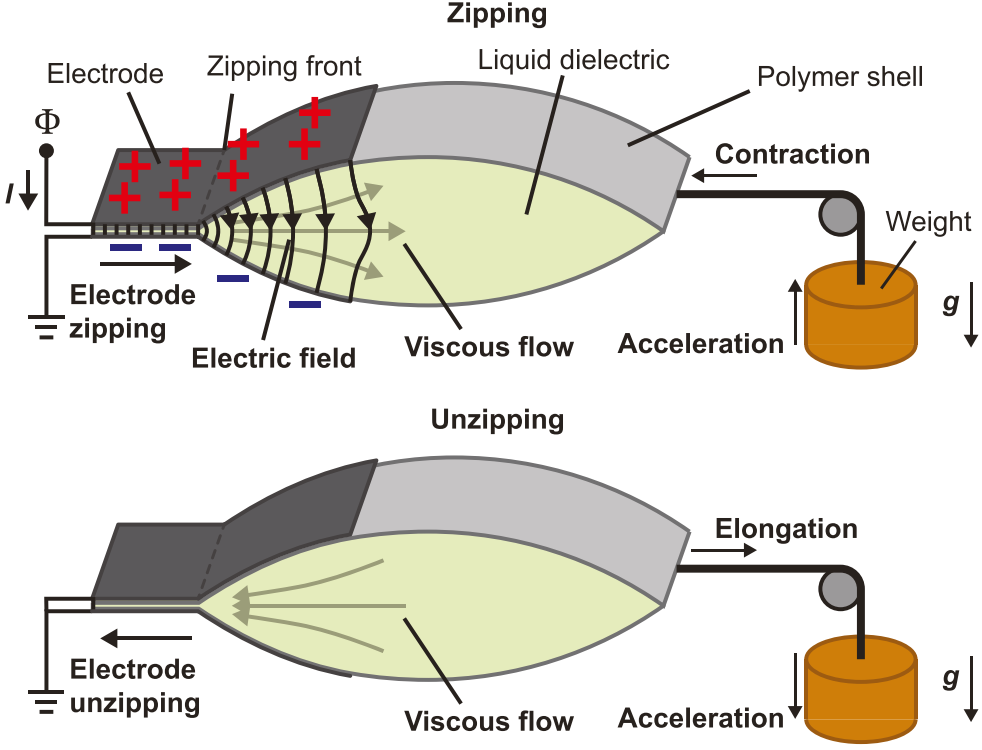
Nature has inspired the design of robots in which soft actuators enable tasks such as handling of fragile objects and adapting to unstructured environments. Those tasks are difficult for traditional robots, which predominantly consist of hard components. Electrohydraulic soft actuators are liquid-filled shells that deform upon the application of electric fields; they excel among soft actuators with muscle-like force outputs and actuation strains, and with actuation frequencies above 100 Hz. However, the fundamental physics that governs the dynamics of electrohydraulic soft actuators is unexplored. Here, we study the dynamics of electrohydraulic soft actuators using the Peano-HASEL (hydraulically amplified self-healing electrostatic) actuator as a model system. Using experiments and a scaling analysis, we discover two dynamic regimes: a regime in which viscous dissipation reduces the actuation speed and a regime governed by inertial effects in which high-speed actuation is possible. For each regime, we derive a timescale that describes the influence of geometry, materials system, and applied external loads on the actuation speed. We also derive a model to study the dynamic behavior of Peano-HASEL actuators in both regimes. Although this analysis focuses on the Peano-HASEL actuator, the presented results may readily be generalized to other electrohydraulic actuators. When designed to operate in the inertial regime, electrohydraulic actuators will enable bio-inspired robots with unprecedented speeds of motion.
| Author(s): | Philipp Rothemund and Sophie Kirkman and Christoph Keplinger |
| Journal: | Proceedings of the National Academy of Sciences of the United States of America |
| Volume: | 117 |
| Number (issue): | 28 |
| Pages: | 16207--16213 |
| Year: | 2020 |
| Department(s): | Robotic Materials |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1073/pnas.2006596117 |
|
BibTex @article{Rothemund20-PNAS-Dynamics,
title = {Dynamics of Electrohydraulic Soft Actuators},
author = {Rothemund, Philipp and Kirkman, Sophie and Keplinger, Christoph},
journal = {Proceedings of the National Academy of Sciences of the United States of America},
volume = {117},
number = {28},
pages = {16207--16213},
year = {2020},
doi = {10.1073/pnas.2006596117}
}
|
|