High-Strain Peano-HASEL Actuators
2020
Article
rm
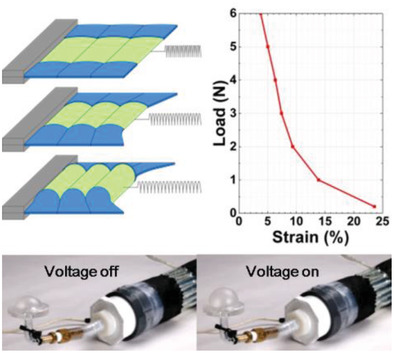
Soft robots are intrinsically safe for use near humans and adaptable when operated in unstructured environments, thereby offering capabilities beyond traditional robots based on rigid components. Soft actuators are key components of soft robots; recently developed hydraulically amplified self-healing electrostatic (HASEL) actuators provide a versatile framework to create high-speed actuators with excellent all-around performance. Peano-HASEL actuators linearly contract upon application of voltage, closely mimicking the behavior of muscle. Peano-HASEL actuators, however, produce a maximum strain of ≈15%, while skeletal muscles achieve ≈20% on average. Here, a new type of HASEL is introduced, termed high-strain Peano-HASEL (HS-Peano-HASEL) actuator, that achieves linear contraction up to ≈24%. A wide range of performance metrics are investigated, and the maximum strain of multiunit HS-Peano-HASEL actuators is optimized by varying materials and geometry. Furthermore, an artificial circular muscle (ACM) based on the HS-Peano-HASEL acts as a tubular pump, resembling the primordial heart of an ascidian. Additionally, a strain-amplifying pulley system is introduced to increase the maximum strain of an HS-Peano-HASEL to 42%. The muscle-like maximum actuation strain and excellent demonstrated all-around performance of HS-Peano-HASEL actuators make them promising candidates for use in artificial organs, life-like robotic faces, and a variety of other robotic systems.
| Author(s): | Xingrui Wang and Shane K. Mitchell and Ellen H. Rumley and Philipp Rothemund and Christoph Keplinger |
| Journal: | Advanced Functional Materials |
| Volume: | 30 |
| Number (issue): | 7 |
| Pages: | 1908821 |
| Year: | 2020 |
| Department(s): | Robotic Materials |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1002/adfm.201908821 |
|
BibTex @article{Wang20-AFM-HighStrain,
title = {High-Strain Peano-HASEL Actuators},
author = {Wang, Xingrui and Mitchell, Shane K. and Rumley, Ellen H. and Rothemund, Philipp and Keplinger, Christoph},
journal = {Advanced Functional Materials},
volume = {30},
number = {7},
pages = {1908821},
year = {2020},
doi = {10.1002/adfm.201908821}
}
|
|