Simulating Electrohydraulic Soft Actuator Assemblies Via Reduced Order Modeling
2022
Conference Paper
rm
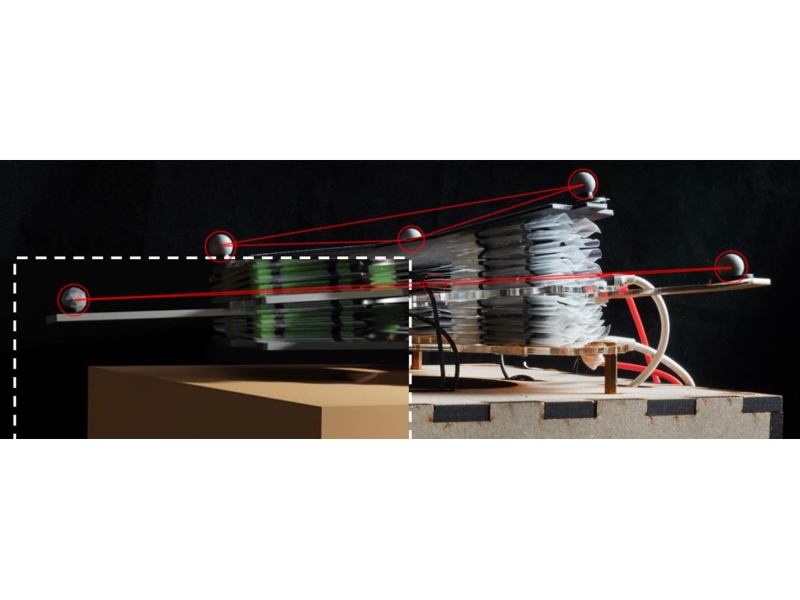
Soft robots compliment traditional rigid robots by expanding their capabilities to interact with the physical world. A robot made with compliant, soft materials can benefit from their inherent continuum mechanics to achieve interactions with the environment that a rigid robot may find difficult. This can include grasping delicate objects, navigating through variable terrain, or working alongside humans in a safer manner. The flexible, adaptable nature of soft robots provide these benefits, but they also make predicting their actuated response a difficult, computationally-intensive task. Here we provide a non-linear, reduced order model informed by collected data on hydraulically amplified self-healing electrostatic actuators (HASELs). With this reduced order model, we simulate robots comprised of multiple actuators in an effort to rapidly evaluate potential design candidates without the need for time-consuming manufacturing. The simulation leverages a reduced-order model of HASELs based on a parallel mass spring damper (MSD) representation, made of two non-linear springs, and a damper; this data-driven parameter identification aids model fidelity. We construct a robotic manipulator actuated via six HASELs and show that the simulations driven by the non-linear MSD models accurately predict the robot's physical behavior on a macro scale. While this work focuses on a specific actuator type, the approach shown here could be extended to other linearly expanding soft actuators. Using this method, soft robotic assemblies actuated via HASELs can be rapidly evaluated in simulation before a laborious manufacturing process, which in turn will allow for faster design iterations to create more effective robots.
| Author(s): | Travis Hainsworth and Ingemar Schmidt and Vani Sundaram and Gregory L Whiting and Christoph Keplinger and Robert MacCurdy |
| Book Title: | SOFT ROBOTICS. IEEE INTERNATIONAL CONFERENCE. 5TH 2022. (RoboSoft 2022) |
| Pages: | 21-28 |
| Year: | 2022 |
| Month: | April |
| Day: | 4 |
| Publisher: | Institute of Electrical and Electronics Engineers (IEEE) |
| Department(s): | Robotic Materials |
| Bibtex Type: | Conference Paper (conference) |
| Paper Type: | Conference |
| DOI: | 10.1109/ROBOSOFT54090.2022.9762073 |
| Event Name: | 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft) |
| Event Place: | Edinburgh, Scotland |
| State: | Published |
| URL: | https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9762073 |
|
BibTex @conference{Keplinger22-RoboSoft22-reduced-order-modeling,
title = {Simulating Electrohydraulic Soft Actuator Assemblies Via Reduced Order Modeling},
author = {Hainsworth, Travis and Schmidt, Ingemar and Sundaram, Vani and Whiting, Gregory L and Keplinger, Christoph and MacCurdy, Robert},
booktitle = {SOFT ROBOTICS. IEEE INTERNATIONAL CONFERENCE. 5TH 2022. (RoboSoft 2022)},
pages = {21-28},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
month = apr,
year = {2022},
doi = {10.1109/ROBOSOFT54090.2022.9762073},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9762073},
month_numeric = {4}
}
|
|