A Versatile Jellyfish-Like Robotic Platform for Effective Underwater Propulsion and Manipulation
2023
Article
minibot
pi
rm
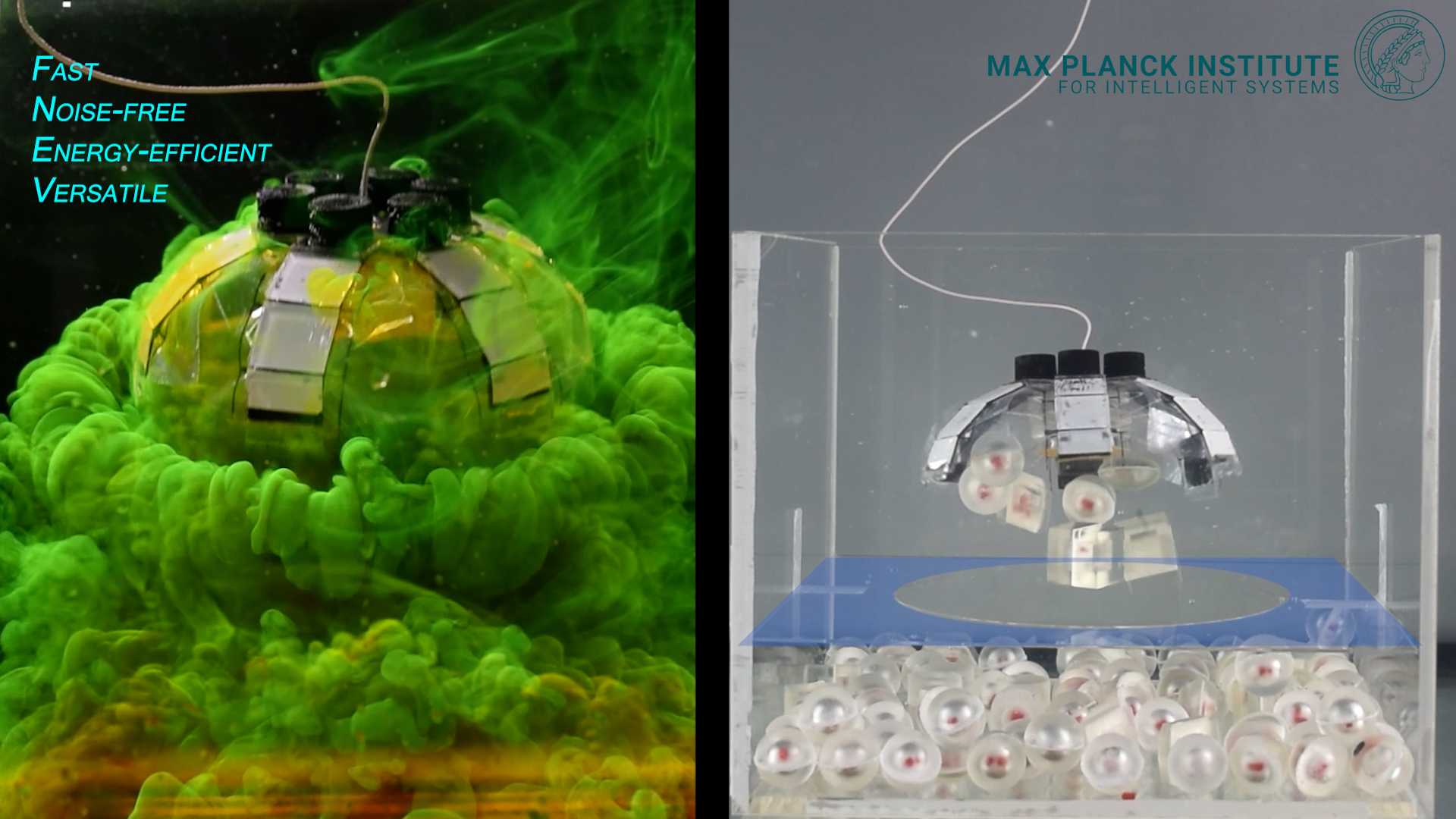
Underwater devices are critical for environmental applications. However, existing prototypes typically use bulky, noisy actuators and limited configurations. Consequently, they struggle to ensure noise-free and gentle interactions with underwater species when realizing practical functions. Therefore, we developed a jellyfish-like robotic platform enabled by a synergy of electrohydraulic actuators and a hybrid structure of rigid and soft components. Our 16-cm-diameter noise-free prototype could control the fluid flow to propel while manipulating objects to be kept beneath its body without physical contact, thereby enabling safer interactions. Its against-gravity speed was up to 6.1 cm/s, substantially quicker than other examples in literature, while only requiring a low input power of around 100 mW. Moreover, using the platform, we demonstrated contact-based object manipulation, fluidic mixing, shape adaptation, steering, wireless swimming, and cooperation of two to three robots. This study introduces a versatile jellyfish-like robotic platform with a wide range of functions for diverse applications.
| Author(s): | Tianlu Wang and Hyeong-Joon Joo and Shanyuan Song and Wenqi Hu and Christoph Keplinger and Metin Sitti |
| Journal: | Science Advances |
| Volume: | 9 |
| Number (issue): | 15 |
| Year: | 2023 |
| Month: | April |
| Publisher: | American Association for the Advancement of Science |
| Department(s): | Bioinspired Autonomous Miniature Robots, Physical Intelligence, Robotic Materials |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| Article Number: | adg0292 |
| DOI: | doi.org/10.1126/sciadv.adg0292 |
| Note: | Tianlu Wang and Hyeong-Joon Joo contributed equally to this work. |
| State: | Published |
| URL: | https://www.science.org/doi/epdf/10.1126/sciadv.adg0292 |
| Links: |
YouTube video
|
| Video: | |
|
BibTex @article{Joo23-SCIA-Jellyfish,
title = {A Versatile Jellyfish-Like Robotic Platform for Effective Underwater Propulsion and Manipulation},
author = {Wang, Tianlu and Joo, Hyeong-Joon and Song, Shanyuan and Hu, Wenqi and Keplinger, Christoph and Sitti, Metin},
journal = {Science Advances},
volume = {9},
number = {15},
publisher = {American Association for the Advancement of Science},
month = apr,
year = {2023},
note = {Tianlu Wang and Hyeong-Joon Joo contributed equally to this work.},
doi = {doi.org/10.1126/sciadv.adg0292},
url = {https://www.science.org/doi/epdf/10.1126/sciadv.adg0292},
month_numeric = {4}
}
|
|