A Soft, Fast and Versatile Electrohydraulic Gripper with Capacitive Object Size Detection
2023
Article
rm
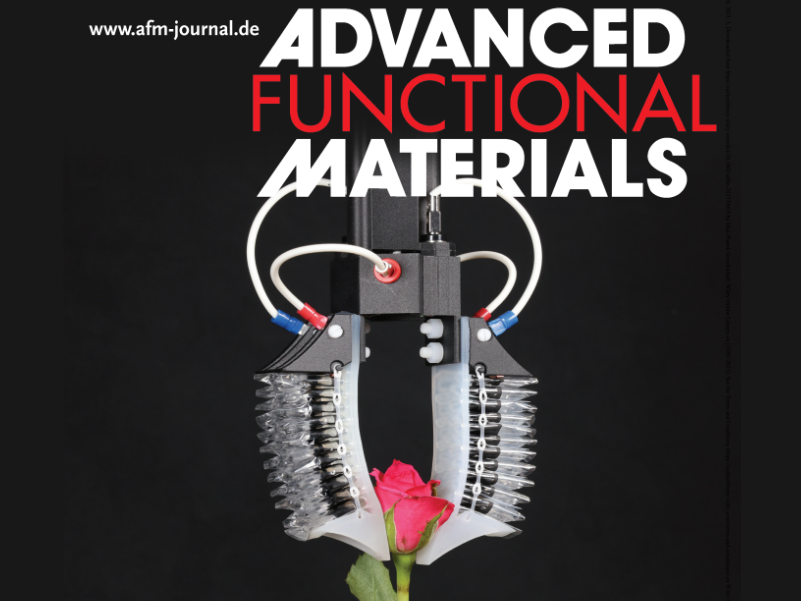
Soft robotic grippers achieve increased versatility and reduced complexity through intelligence embodied in their flexible and conformal structures. The most widely used soft grippers are pneumatically driven; they are simple and effective but require bulky air compressors that limit their application space and external sensors or computationally expensive vision systems for pick verification. In this study, a multi-material architecture for self-sensing electrohydraulic bending actuators is presented that enables a new class of highly versatile and reconfigurable soft grippers that are electrically driven and feature capacitive pick verification and object size detection. These elec-trohydraulic grippers are fast (step input results in finger closure in 50 ms), draw low power (6.5 mW per finger to hold grasp), and can pick a wide variety of objects with simple binary electrical control. Integrated high-voltage driving electronics are presented that greatly increase the application space of the grippers and make them readily compatible with commercially available robotic arms.
| Author(s): | Zachary Yoder and Daniela Macari and Gavriel Kleinwaks and Ingemar Schmidt and Eric Acome and Christoph Keplinger |
| Journal: | Advanced Functional Materials |
| Volume: | 23 |
| Number (issue): | 3 |
| Pages: | 2209080 |
| Year: | 2023 |
| Department(s): | Robotic Materials |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1002/adfm.202209080 |
| State: | Published |
| Links: |
A Soft, Fast and Versatile Electrohydraulic Gripper with Capacitive Object Size Detection
YouTube video |
| Video: | |
|
BibTex @article{Yoder22-AFM-Gripper,
title = {A Soft, Fast and Versatile Electrohydraulic Gripper with Capacitive Object Size Detection},
author = {Yoder, Zachary and Macari, Daniela and Kleinwaks, Gavriel and Schmidt, Ingemar and Acome, Eric and Keplinger, Christoph},
journal = {Advanced Functional Materials},
volume = {23},
number = {3},
pages = {2209080},
year = {2023},
doi = {10.1002/adfm.202209080}
}
|
|