
2024
Yoder, Z., Rumley, E., Schmidt, I., Rothemund, P., Keplinger, C.
Hexagonal electrohydraulic modules for rapidly reconfigurable high-speed robots
Science Robotics, 9, September 2024 (article)
Sanchez-Tamayo, N., Yoder, Z., Rothemund, P., Ballardini, G., Keplinger, C., Kuchenbecker, K. J.
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Advanced Science, (2402461):1-14, September 2024 (article)
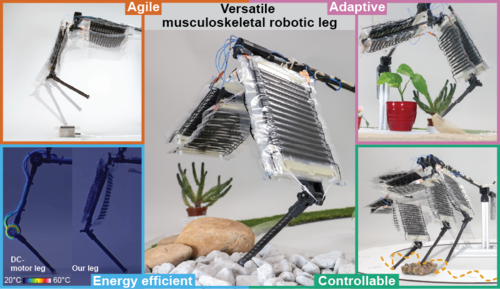
Buchner, T. J. K., Fukushima, T., Kazemipour, A., Gravert, S., Prairie, M., Romanescu, P., Arm, P., Zhang, Y., Wang, X., Zhang, S. L., Walter, J., Keplinger, C., Katzschmann, R. K.
Electrohydraulic Musculoskeletal Robotic Leg for Agile, Adaptive, yet Energy-Efficient Locomotion
Nature Communications, 15(1), September 2024 (article)
2023
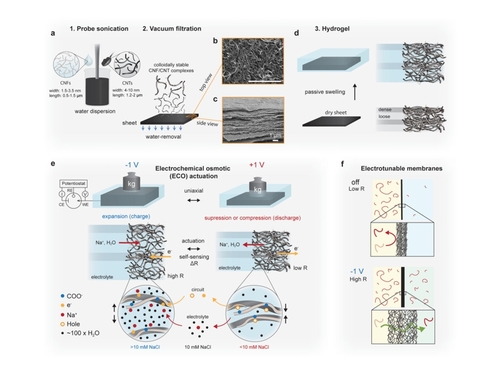
Benselfelt, T., Shakya, J., Rothemund, P., Lindström, S. B., Piper, A., Winkler, T. E., Hajian, A., Wågberg, L., Keplinger, C., Hamedi, M. M.
Electrochemically Controlled Hydrogels with Electrotunable Permeability and Uniaxial Actuation
Advanced Materials, 35(45):2303255, Wiley-VCH GmbH, November 2023 (article)
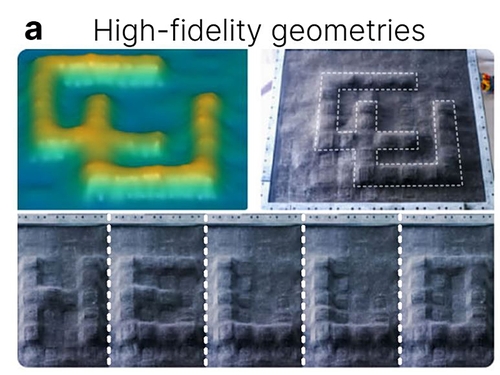
Johnson, B. K., Naris, M., Sundaram, V., Volchko, A., Ly, K., Mitchell, S. K., Acome, E., Kellaris, N., Keplinger, C., Correll, N., Humbert, J. S., Rentschler, M. E.
A Multifunctional Soft Robotic Shape Display with High-speed Actuation, Sensing, and Control
Nature Communications, 14(1), July 2023 (article)
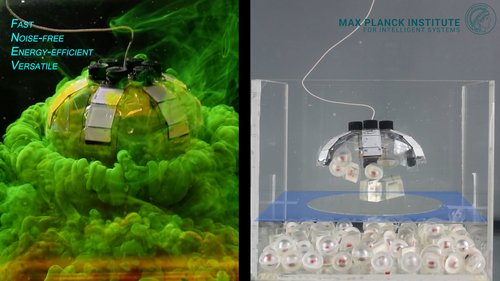
Wang, T., Joo, H., Song, S., Hu, W., Keplinger, C., Sitti, M.
A Versatile Jellyfish-Like Robotic Platform for Effective Underwater Propulsion and Manipulation
Science Advances, 9(15), American Association for the Advancement of Science, April 2023, Tianlu Wang and Hyeong-Joon Joo contributed equally to this work. (article)
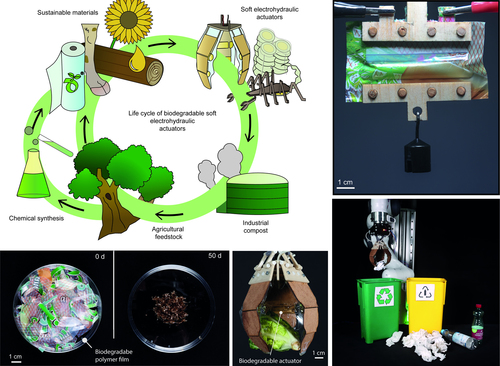
Rumley, E. H., Preninger, D., Shagan-Shomron, A., Rothemund, P., Hartmann, F., Baumgartner, M., Kellaris, N., Stojanovic, A., Yoder, Z., Karrer, B., Keplinger, C., Kaltenbrunner, M.
Biodegradable Electrohydraulic Actuators for Sustainable Soft Robots
Science Advances, 9(12), 2023, Ellen H. Rumley and David Preninger were co-first authors, and Christoph Keplinger and Martin Kaltenbrunner were shared corresponding authors. (article)
Yoder, Z., Macari, D., Kleinwaks, G., Schmidt, I., Acome, E., Keplinger, C.
A Soft, Fast and Versatile Electrohydraulic Gripper with Capacitive Object Size Detection
Advanced Functional Materials, 23(3):2209080, 2023 (article)
2022
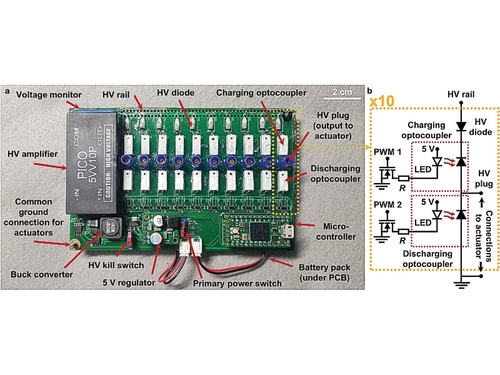
Mitchell, S. K., Martin, T., Keplinger, C.
A Pocket‐Sized Ten‐Channel High Voltage Power Supply for Soft Electrostatic Actuators
Advanced Materials Technologies, 7(8), August 2022 (article)
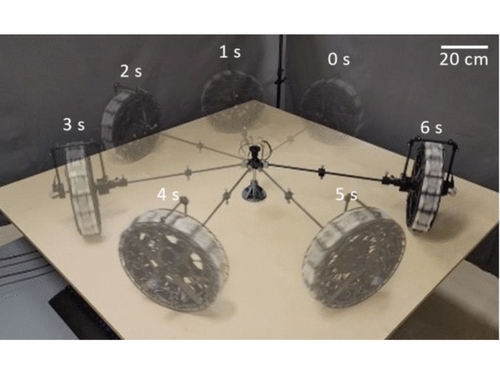
Ly, K., Mayekar, J. V., Aguasvivas, S., Keplinger, C., Rentschler, M. E., Correll, N.
Electro-hydraulic Rolling Soft Wheel: Design, Hybrid Dynamic Modeling, and Model Predictive Control
IEEE Transactions on Robotics, 38(5):3044-3063, IEEE, May 2022 (article)
Aubin, C. A., Gorissen, B., Milana, E., Buskohl, P. R., Lazarus, N., Slipher, G. A., Keplinger, C., Bongard, J., Iida, F., Lewis, J. A., Shepherd, R. F.
Towards Enduring Autonomous Robots via Embodied Energy
Nature, 602(7897):393-402, 2022 (article)
2021
Ly, K., Kellaris, N., McMorris, D., Johnson, B. K., Acome, E., Sundaram, V., Naris, M., Humbert, J. S., Rentschler, M. E., Keplinger, C., Correll, N.
Miniaturized Circuitry for Capacitive Self-sensing and Closed-loop Control of Soft Electrostatic Transducers
Soft Robotics, 8(6):673-686, Mary Ann Liebert, Inc., publishers, December 2021 (article)
Wang, Y., Liu, X., Wang, Y., Wang, H., Wang, H., Zhang, S. L., Zhao, T., Xu, M., Wang, Z. L.
Flexible Seaweed-Like Triboelectric Nanogenerator as a Wave Energy Harvester Powering Marine Internet of Things
ACS Nano, 15(10):15700-15709, October 2021 (article)
Wang, Y., Liu, D., Hu, Z., Chen, T., Zhang, Z., Wang, H., Du, T., Zhang, S. L., Zhao, Z., Zhou, T., Xu, M.
A Triboelectric-Nanogenerator-Based Gas–Solid Two-Phase Flow Sensor for Pneumatic Conveying System Detecting
Advanced Materials Technologies, 6(5):2001270, 2021 (article)

Rothemund, P., Kim, Y., Heisser, R. H., Zhao, X., Shepherd, R. F., Keplinger, C.
Shaping the future of robotics through materials innovation
Nature Materials, 20(12):1582-1587, 2021 (article)

Kellaris, N., Rothemund, P., Zeng, Y., Mitchell, S. K., Smith, G. M., Jayaram, K., Keplinger, C.
Spider-Inspired Electrohydraulic Actuators for Fast, Soft-Actuated Joints
Advanced Science, 8(14):2100916, 2021 (article)
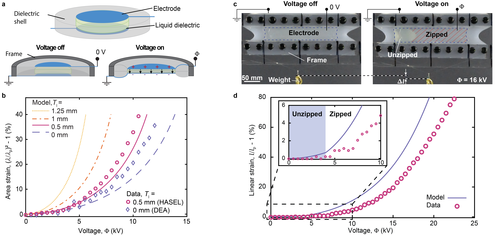
Kirkman, S., Rothemund, P., Acome, E., Keplinger, C.
Electromechanics of Planar HASEL Actuators
Extreme Mechanics Letters, 48, pages: 101408, 2021 (article)
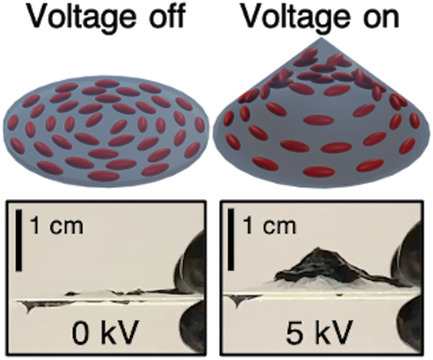
Fowler, H. E., Rothemund, P., Keplinger, C., White, T. J.
Liquid Crystal Elastomers with Enhanced Directional Actuation to Electric Fields
Advanced Materials, 33(43):2103806, 2021 (article)