How Inhomogeneous Zipping Increases the Force Output of Peano-HASEL Actuators
2019
Article
rm
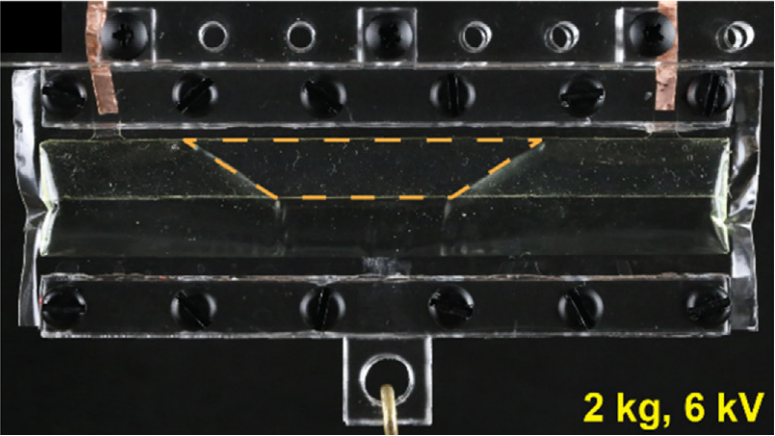
Research in soft robotics has yielded numerous types of soft actuators with widely differing mechanisms of operation that enable functionality that is difficult or impossible to reproduce with hard actuators such as electromagnetic motors. The Peano-HASEL (hydraulically amplified self-healing electrostatic) actuator is a new type of electrostatic, linearly contracting, soft actuator that features large strains, fast actuation, and high energy densities. Peano-HASEL actuators are comprised of pouches, which are made of flexible dielectric polymer films, filled with a liquid dielectric, and covered with flexible electrodes. When a voltage is applied to the electrodes, they ‘‘zip’’ together due to the Maxwell stress, which displaces the liquid inside the pouch, and causes the actuator to contract. Zipping can occur homogeneously or inhomogeneously. In this letter we analyze inhomogeneous zipping and its influence on the performance of Peano-HASEL actuators. We develop a theoretical model that describes inhomogeneous as well as homogeneous zipping of the electrodes and characterize the behavior of actuators experimentally. Inhomogeneous zipping occurs (depending on the size of the electrodes) predominantly at large loads, because it allows for larger areas of the electrodes to be zipped. Inhomogeneous zipping increases the blocking force of the actuators and leads to larger actuation strains near the blocking force. Exploiting inhomogeneous zipping by increasing the electrode size enables an increase in the blocking force of the actuators by up to 47%.
| Author(s): | Philipp Rothemund and Nicholas Kellaris and Christoph Keplinger |
| Journal: | Extreme Mechanics Letters |
| Volume: | 31 |
| Pages: | 100542 |
| Year: | 2019 |
| Department(s): | Robotic Materials |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1016/j.eml.2019.100542 |
|
BibTex @article{Rothemund19-EML-Inhomogeneous,
title = {How Inhomogeneous Zipping Increases the Force Output of Peano-HASEL Actuators},
author = {Rothemund, Philipp and Kellaris, Nicholas and Keplinger, Christoph},
journal = {Extreme Mechanics Letters},
volume = {31},
pages = {100542},
year = {2019},
doi = {10.1016/j.eml.2019.100542}
}
|
|