An Analytical Model for the Design of Peano-HASEL Actuators with Drastically Improved Performance
2019
Article
rm
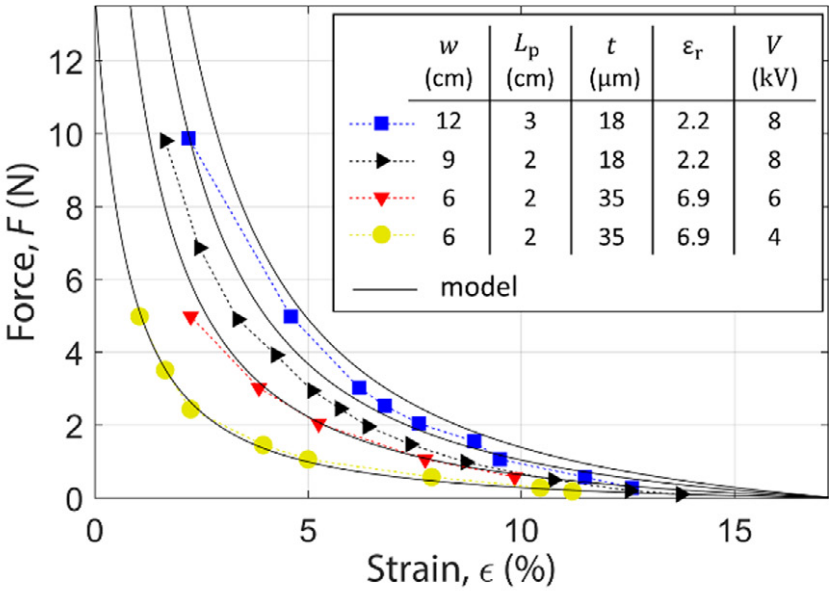
The emerging field of soft robotics promises applications in areas such as human–machine interaction, industrial automation, and biomedical devices. Electrohydraulic Peano-HASEL (hydraulically amplified self-healing electrostatic) actuators feature muscle-like linear contraction on activation, fast operation, and direct electrical control, which makes them a versatile actuator for soft robotics. To better understand the impact of geometry and materials on actuator performance, we develop an analytical model – based on minimizing the total energy of the actuator system – that accurately predicts the quasi-static behavior of the actuators without relying on fitting parameters. We present extensive experimental validation of this model for actuators with varying geometries, as well as actuators made from shell materials with different electrical and mechanical properties. Using these results, we identify design rules for the development of actuators with tunable force-strain characteristics. As a key result of this paper, we lay out a roadmap for creating Peano-HASELs with drastically improved specific energies. Specifically, we identify a combination of pouch geometry and an existing high-performance shell material for which the model predicts actuators that achieve a specific energy of over 10,000 J/kg, far exceeding maximum values reported for natural muscle (∼ 40 J/kg).
| Author(s): | Nicholas Kellaris and Vidyacharan Gopaluni Venkata and Philipp Rothemund and Christoph Keplinger |
| Journal: | Extreme Mechanics Letters |
| Volume: | 29 |
| Pages: | 100449 |
| Year: | 2019 |
| Department(s): | Robotic Materials |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1016/j.eml.2019.100449 |
|
BibTex @article{Kellaris19-EML-Model,
title = {An Analytical Model for the Design of Peano-HASEL Actuators with Drastically Improved Performance},
author = {Kellaris, Nicholas and Venkata, Vidyacharan Gopaluni and Rothemund, Philipp and Keplinger, Christoph},
journal = {Extreme Mechanics Letters},
volume = {29},
pages = {100449},
year = {2019},
doi = {10.1016/j.eml.2019.100449}
}
|
|